[충청뉴스 이성현 기자] 국내 연구진이 사람이 움직임을 대충 보여주기만 해도 로봇이 필요에 따라 스스로 동작을 세분화해 좁은 틈에 부품을 끼우거나 작은 버튼을 누르는 고난도 작업을 수행할 수 있는 혁신적인 로봇 인공지능 기술을 개발했다.
한국과학기술원(KAIST)은 전산학부 박대형 교수 연구팀이 적은 양의 동작 데이터만으로도 사용자가 원하는 정밀도에 맞춰 움직임을 세밀하게 생성하는 다중 정밀도 조작 모델 ‘디스포(DiSPo)’를 개발했다고 24일 밝혔다.
기존의 로봇 인공지능은 나사를 조이거나 미세 부품을 조립하는 등의 정밀 작업을 배우기 위해 사람이 움직이는 모습을 아주 촘촘한 시간 간격으로 기록한 방대한 양의 고주파 데이터를 학습해야만 했다. 이로 인해 데이터 수집에 막대한 시간과 비용이 소모되는 고질적인 한계가 있었다.
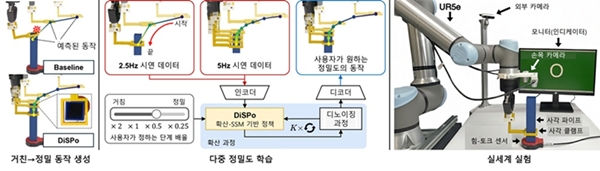
연구팀은 이러한 제약을 극복하기 위해 시간에 따른 변화를 효율적으로 학습하는 상태공간모델 ‘맘바(Mamba)’와 다양한 행동을 생성하는 ‘확산모델(Diffusion Model)’을 결합했다.
여기에 로봇이 사용하는 동작의 정밀도를 외부에서 자유롭게 조절할 수 있는 ‘단계 조정 계수(Step-scale factor)’라는 새로운 장치를 도입해 추가 학습 없이도 작업 상황에 따라 동작을 더 세밀하게 나누거나 크게 조절할 수 있는 유연함을 구현해 냈다.
이번 연구의 가장 핵심적인 발견은 간격이 느슨한 데이터만으로 학습한 로봇이 스스로 더 정밀한 가상의 연습 데이터(의사 시연)를 만들어내고 이를 다시 학습에 활용해 원래 데이터에는 없던 정밀한 동작까지 익힐 수 있다는 점이다.
사람이 일일이 고주파 시범을 보여주지 않아도 로봇이 스스로 부족한 데이터를 채워가며 실력을 끌어올리는 구조다.
실험 결과 개발된 '디스포'는 시뮬레이션 환경에서 기존 최고 성능 모델(행동 트랜스포머, 확산 정책 등) 대비 최대 81% 높은 작업 성공률을 기록했다.
실제 협동로봇을 이용한 전임상 실증 실험에서도 반경이 2.5mm에 불과한 좁은 틈에 부품을 부드럽게 끼워 넣고 스마트폰의 작은 셔터 버튼을 정확하게 누르는 등 고도의 손재주가 필요한 작업을 안정적으로 완수했다. 이는 기존 모델들과 비교했을 때 최대 4배 높은 성공률이다.
새롭게 개발된 디스포 기술은 정밀 부품 조립, 케이블 연결, 의료 수술 로봇, 정밀 가공 등 높은 정확성과 고도의 손재주가 요구되는 다양한 산업 전반에 즉각 적용될 수 있을 것으로 예상된다.
특히 작업자가 동작을 몇 번 대충 보여주는 것만으로도 로봇이 고정밀 작업을 빠르게 학습할 수 있기 때문에, 새로운 작업을 자주 가르쳐야 하는 다품종 소량생산 공장이나 산업 현장에서 활용 가치가 매우 높을 것으로 기대된다.
아울러 이번에 제안된 단계 조정 계수 방식은 로봇 학습 분야를 넘어 시계열 데이터를 다루는 다양한 인공지능 연구 전반에도 응용될 수 있는 확장성을 지녔다.
박대형 교수는 “이번 연구는 로봇이 적은 양의 데이터만으로도 정교한 동작을 스스로 학습하고 상황에 맞춰 정밀도를 제어할 수 있음을 입증한 선도적 사례”라며 “앞으로 데이터 수집과 저장 비용을 획기적으로 줄이면서도 정밀 제조와 의료 등 실제 산업 현장에서 즉각 투입 가능한 범용 로봇 학습 기술로 고도화해 나가겠다”고 설명했다.
